The role of vision loading is to replace the material tray for work-piece loading. The work-piece will be placed on the conveyor belt loading area. The belt will convey the piece to the photo area. The camera will take a picture and the robot will then grip the part.
The programming is quick and intuitive.
2D DEFECTS RECOGNITION
For the finished polished products, we use a 2D black and white camera to take pictures of the work-piece and analyze whether the dimensions of the polished products are qualified or not through customised image processing algorithms and classify the products for the inspection.
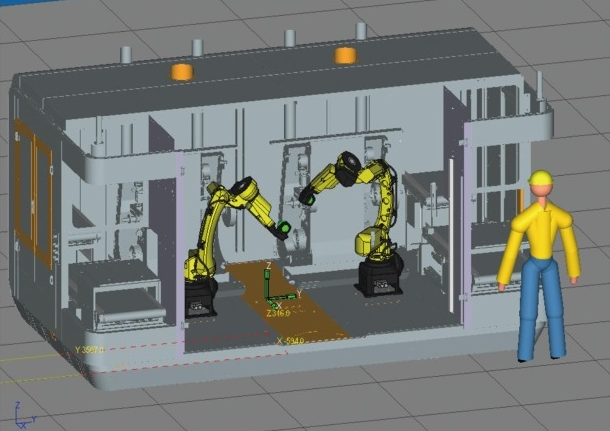
OFFLINE PROGRAMMING
Robot offline programming indicates that the operator uses the programming software only to build the entire robot work application scene in a 3D dimensional working environment. Then, according to the deburring process demands and needs, a series of operations will be generated automatically the robot trajectories, simulations and adjusting of them and finally generate the program to be transmitted to the robot for the execution.
Available options:
FAST AND OPTIMIZED
Programming Of Trajectories
VISUALIZE
The Robot's Work Processes
AUTOMATICALLY PROGRAMMING
For Complex Tasks
HIGH SECURITY
Keeps Programmers Out Of Hazardous Work Environments